製品情報
AI搭載型 3次元追従外観検査システム「KITOV」
こんな悩みはKITOVにお任せ
- ■ 固定カメラでは検査ポイントを撮影しきれない
- ■ テクスチャーや素材特性に惑わされて検出しきれない
- ■ 仕様・工程変更や多品種少量生産について行けない
目視検査と従来の固定カメラとKITOVの比較
| 目視検査 | 従来の固定カメラ | |
|---|---|---|
| メリット | ■ 難易度の高い欠陥を短時間に検出可能 ■ 経験値により検査スキルが向上 |
■ 一品大量生産の工程で、 一定の品質と速度で検査できる |
| デメリット | ■ 検査品質が検査員の体調によりばらつく ■ 検査品質が個人差によりばらつく ■ 採用が困難 ■ スキル修得に時間がかかる |
■ 製品全面検査への対応不可 ■ 様々な形状や材質に対応が困難 ■ 小ロット多品種製造ラインには不向き |
KITOVができること!
今までの様々な課題をかかえた外観検査システムはKITOVが解決!
-
検査設定作業の
効率化 -
ルールベースと
ディープラーニング併用で
高精度検出 -
オートスキャンによる
ペンダントレスな
ロボット教示 -
ロボットアームと
複数照明で撮像能力
を最大化 -
3D検査でより
正確なデータを収集 -
優れたAIにより
柔軟な対応 -
検査機能の追加
が可能 -
小ロット
多品種に対応 -
画像データで
トレーサビリティを実現
外観検査を変える! KITOVのクオリティ
KITOVの強み
-
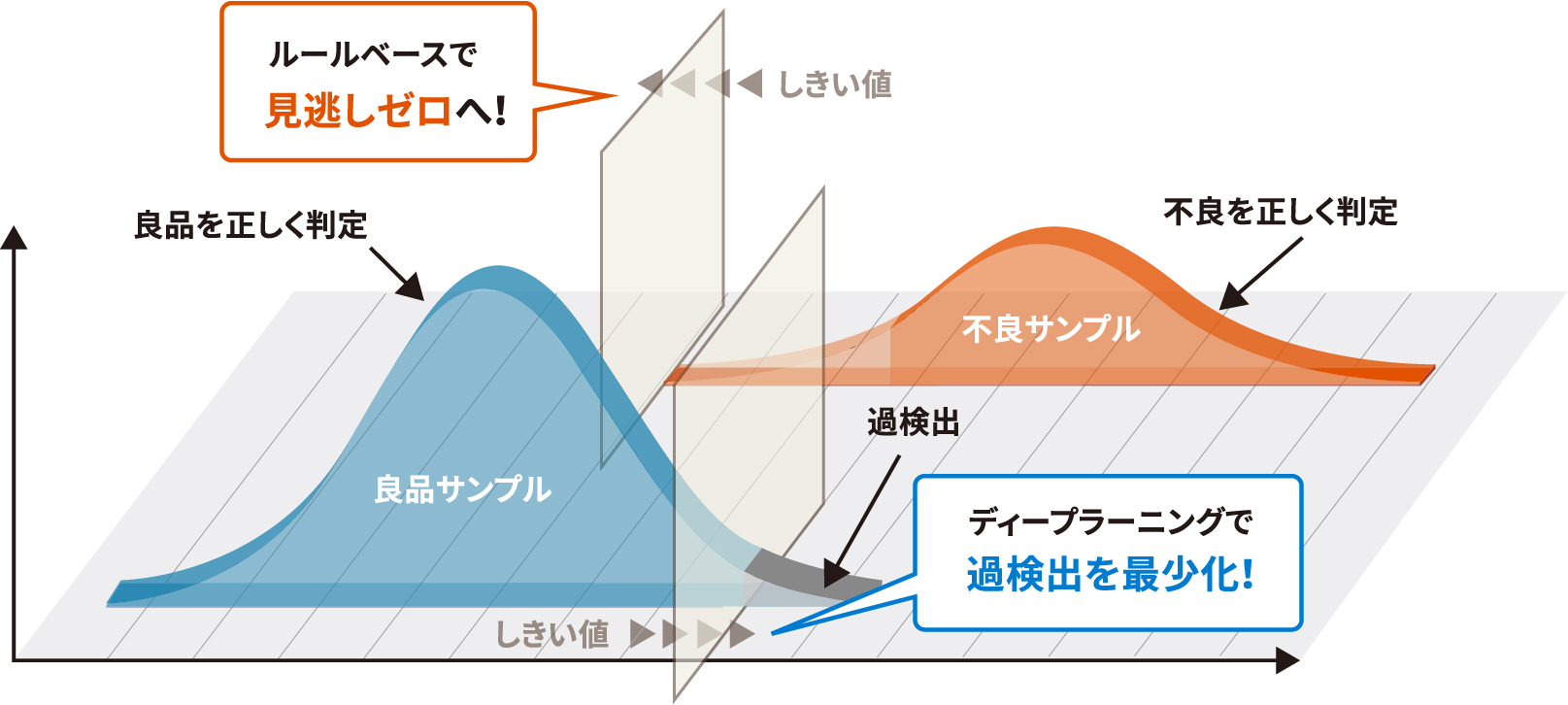
ハイブリッド画像処理
・ルールベースとディープラーニングの「いいとこ取り」の画像処理を実現
-
操作しやすいUI
・ペンダントレスでPCからロボット教示
・タッチパネルで検査結果を確認 -
高度な撮像能力
・ロボットアームと複数照明
-
検査対象の
様々な欠陥に対応・柔軟な機能と高い汎用性
ハイブリッド画像処理
独自の画像処理によって素早く欠陥を検出
ルールベースとディープラーニングを組み合わせたハイブリット画像処理により、過検出を低減
高度な撮像能力
-
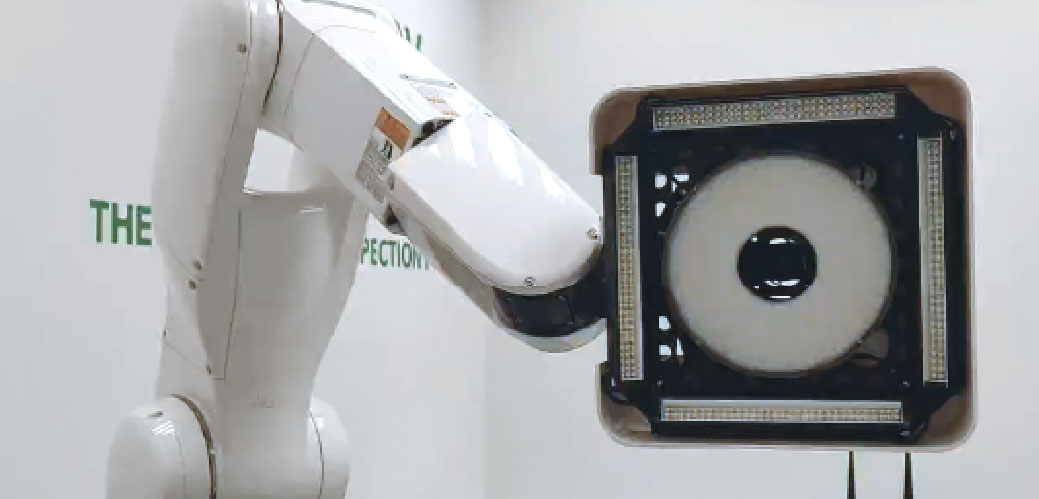
■ 5つ光源を持つスマートな光学ヘッド
-
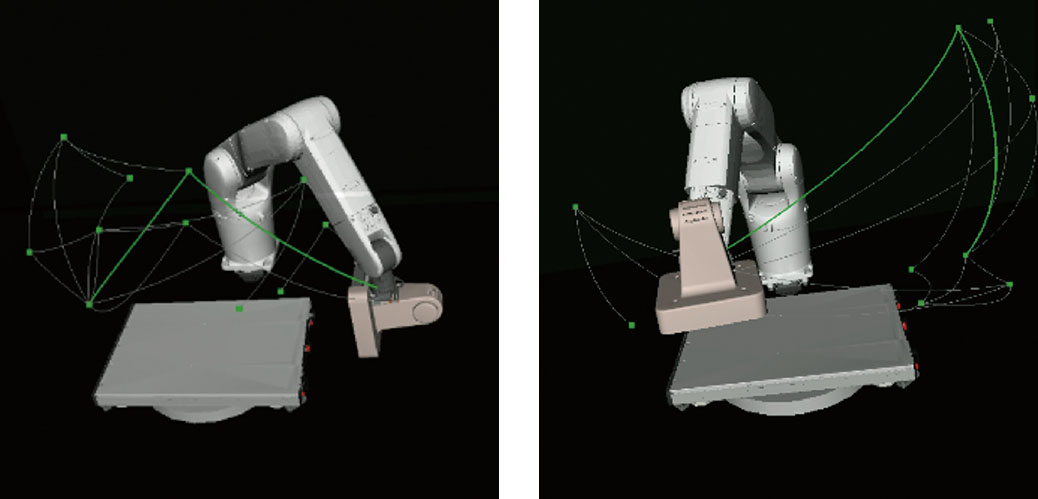
■ ロボットアームによる3D追従で効率よく撮影
簡単なティーチングで最適な撮影・チェックポイントを設定
-
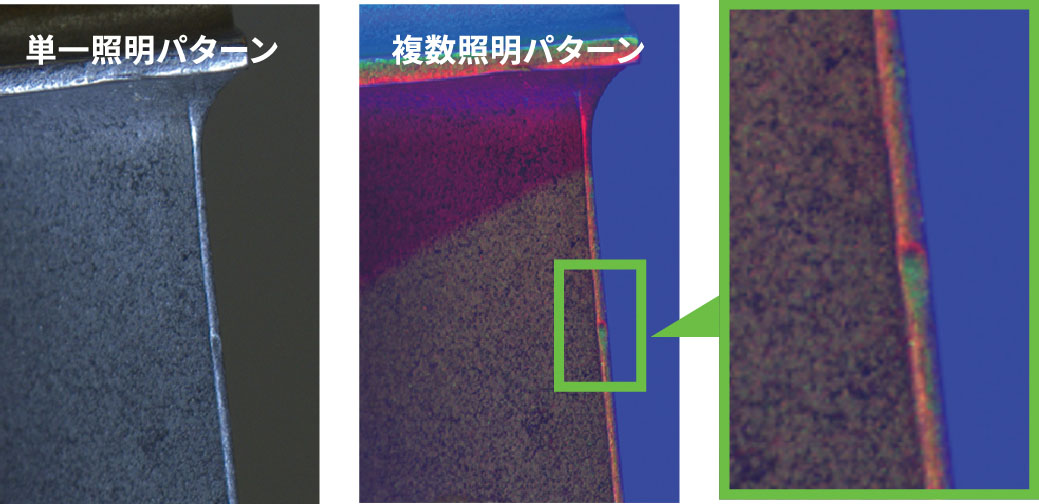
■ 複数照明パターンによる的確なショット
複数の照明パターンで撮影し異常を明確化して検出
-

■ 撮影画像の自動最適化
最も効率的な撮影経路を自動選択
操作しやすいユーザインターフェース
【解りやすい設定・結果表示】
-
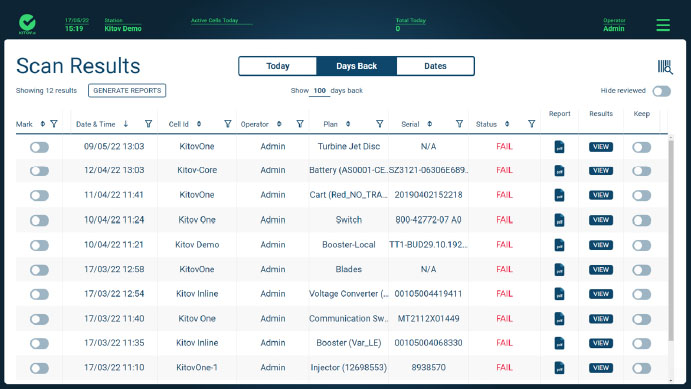
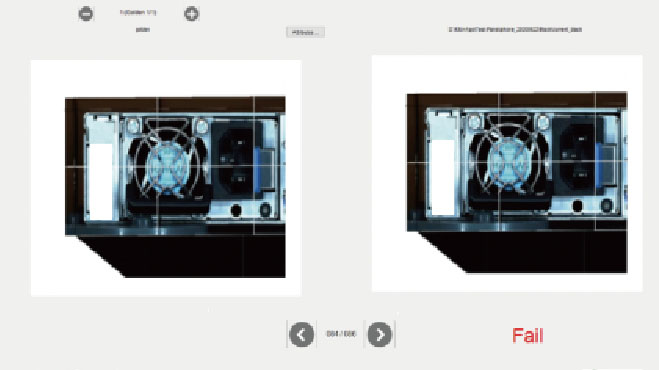
検査結果一覧
-
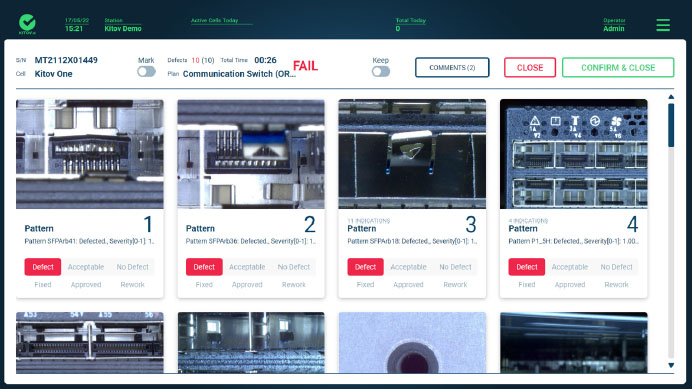
欠陥個所サムネイル
-
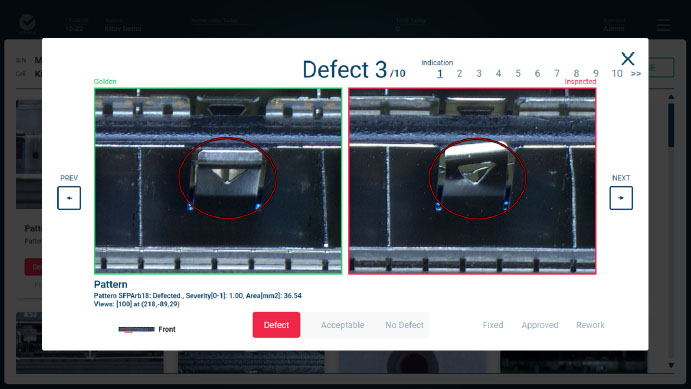
欠陥個所詳細表示
【操作の流れ】
CADデータの取り込み、または3Dスキャンで製品情報を取得し画面上で必要事項を設定。
特別な知識は不要。
-
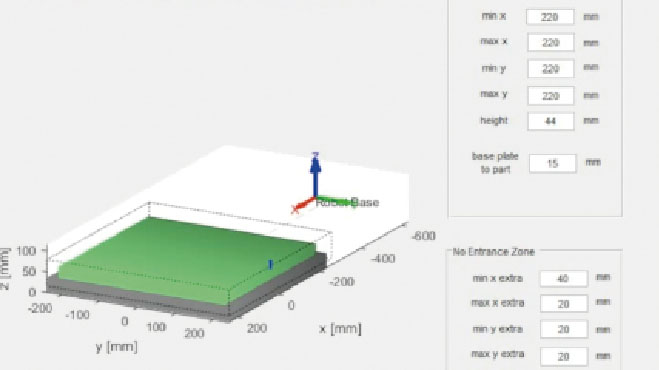
STEP13D CADをインポート
検査する製品のサイズをソフトウェア上で入力します
-

STEP23Dスキャンでデータ取り込み
良品を3Dスキャンして基本となる製品データを取り込みます
-
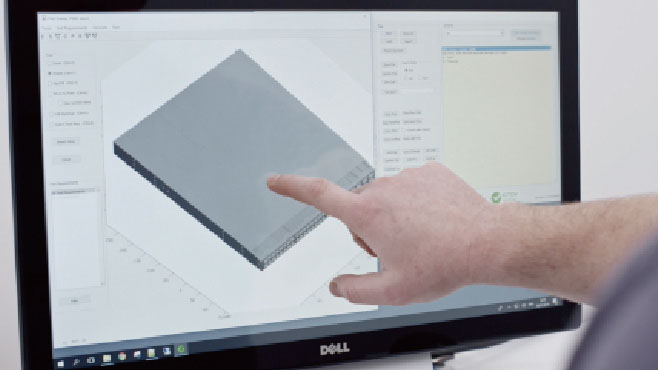
STEP33Dモデルの作成
取り込んだデータをもとに良品の立体画像モデルを作成します
-
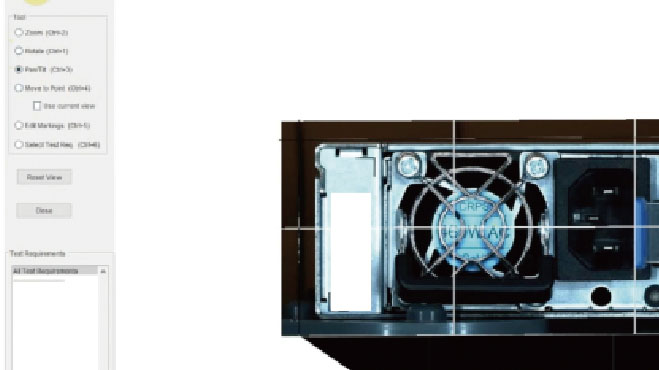
STEP4検査箇所、項目を設定
検査したいポイントをソフトウェア上で指定します
-
STEP5しきい値を設定
欠陥を検出するための画像処理パラメータを設定します
-

STEP6検査スタート
自動検査を開始します
検査対象の様々な欠陥に対応
- ■ 様々な製品に対応する柔軟なソリューション
- ■ 多様な産業用途に対応して検査効率を向上
- ■ 複数パターンに対応可能
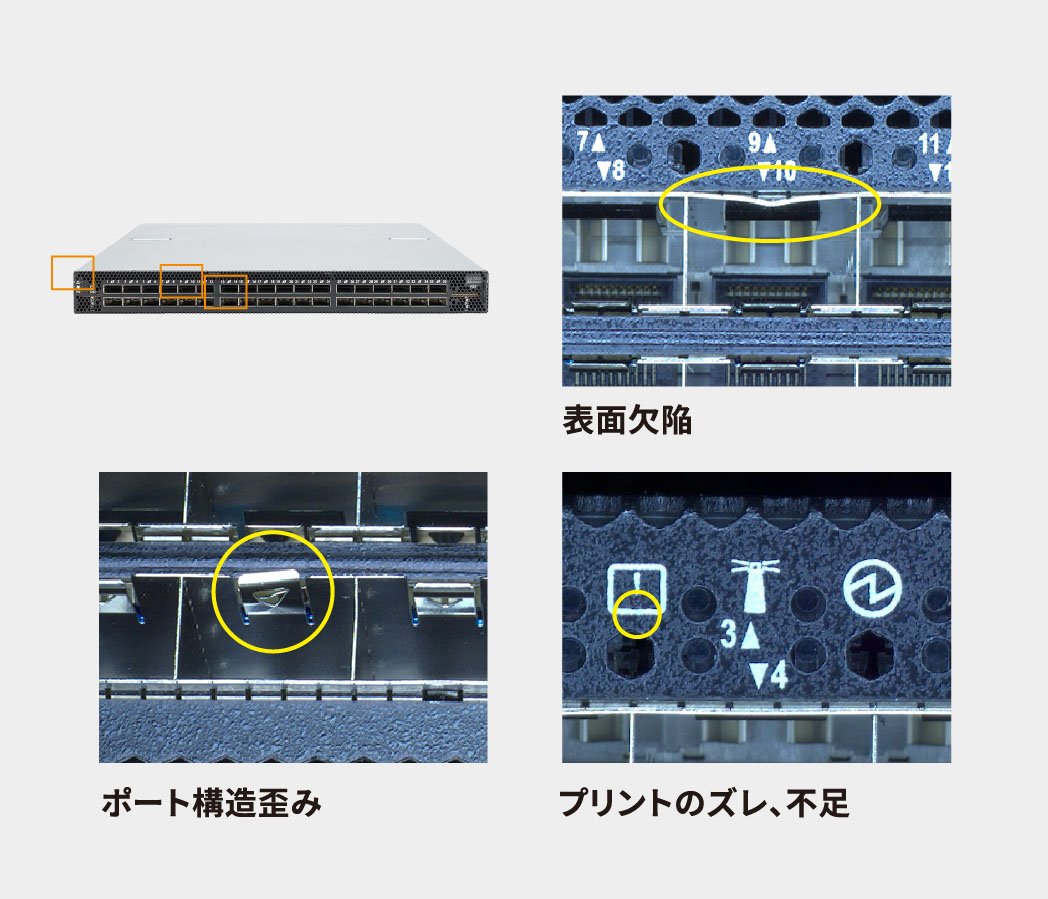
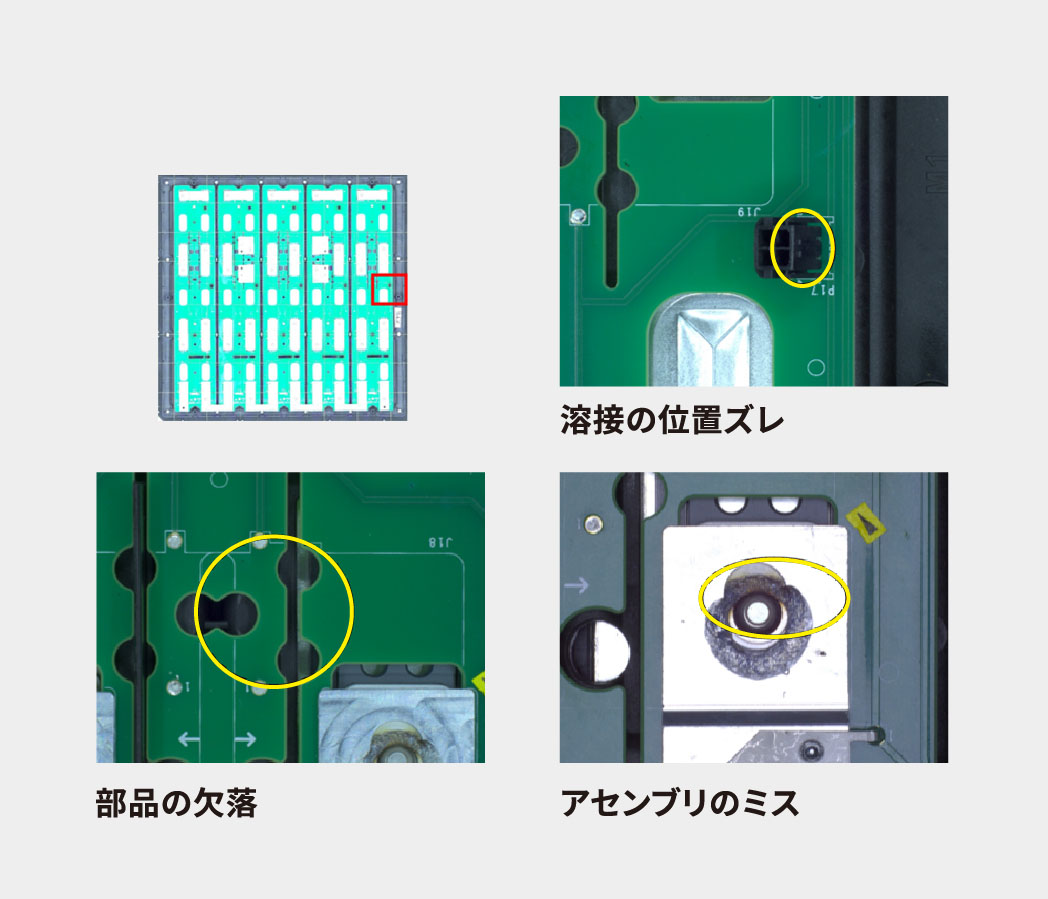
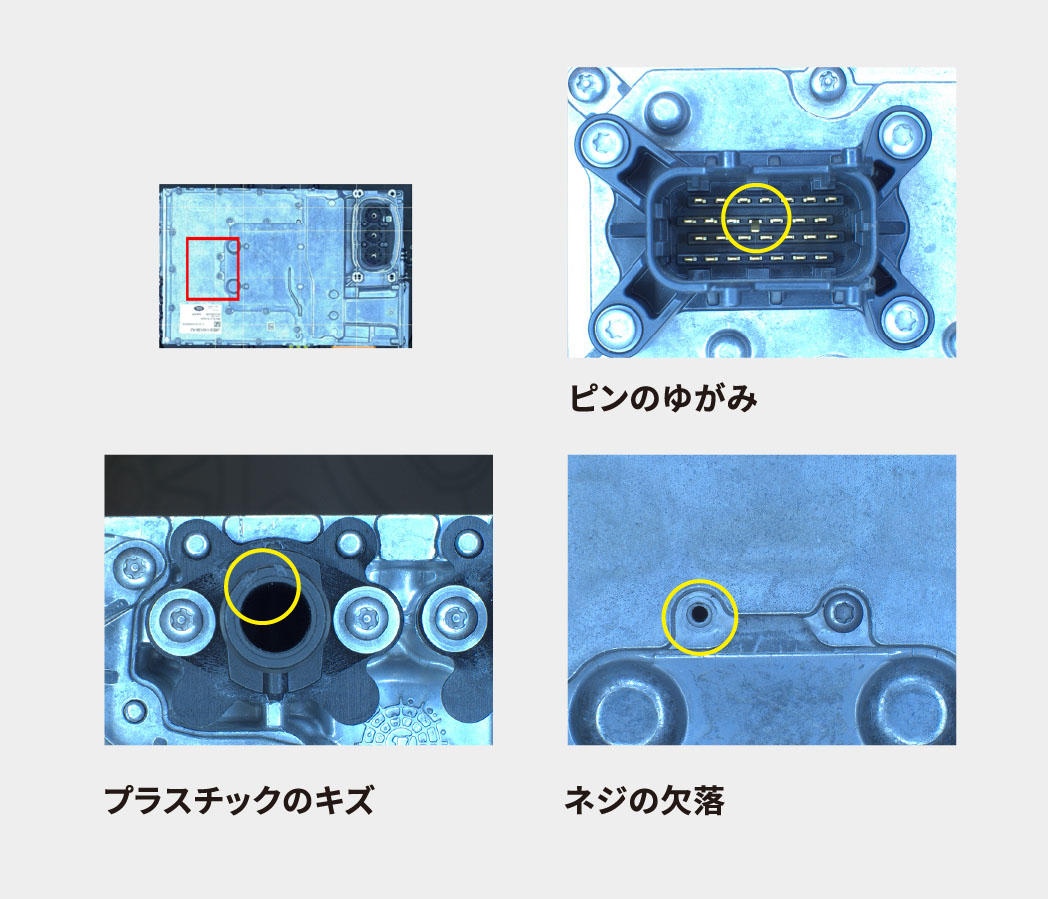
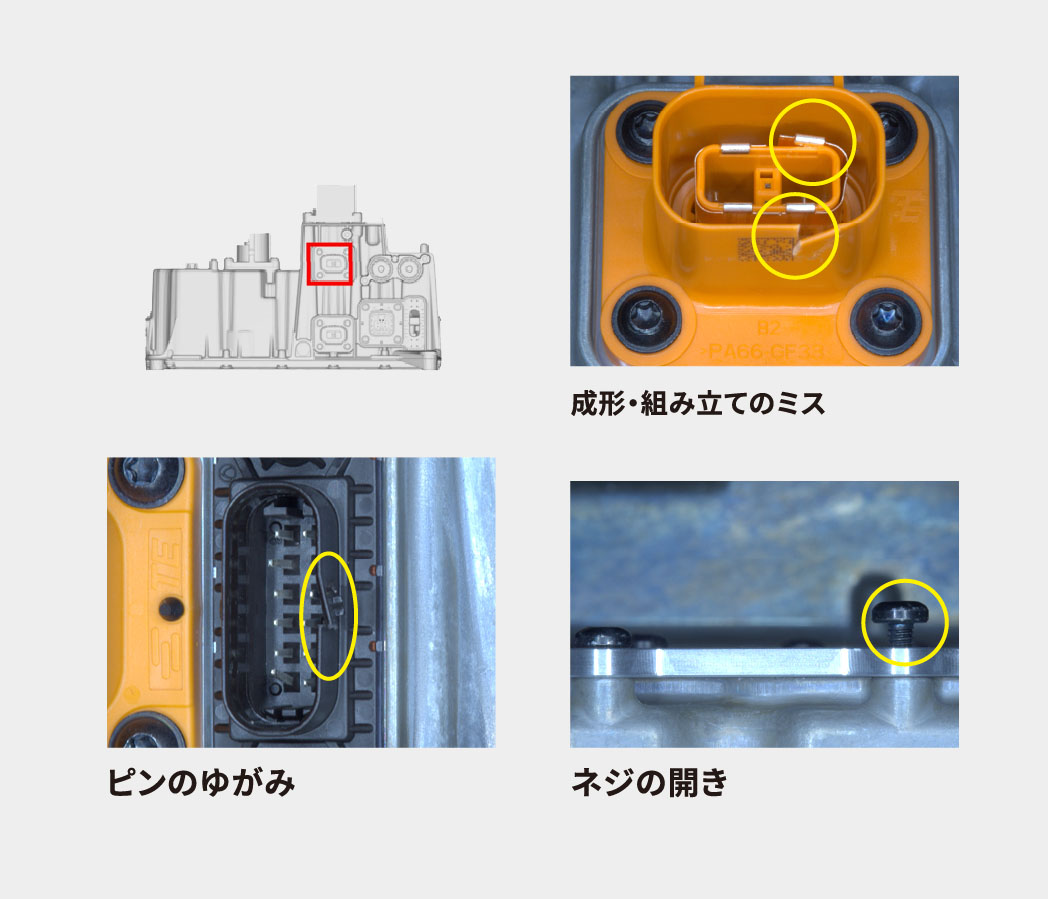
【欠陥検出事例】
-
■ サーバ
-
■ 基盤
-
■ ツールボックス

-
■ EVパワーブースター
-
■ ECパワーブースター
-
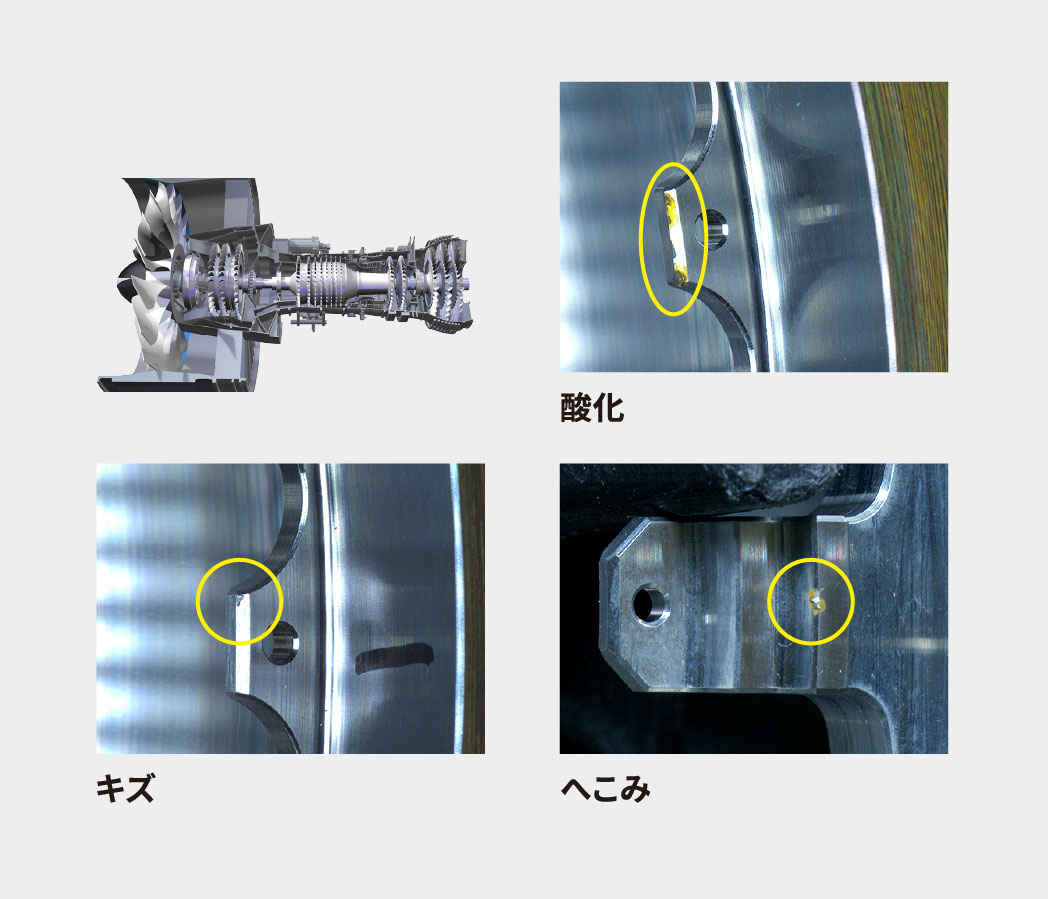
■ ジェットエンジン
-
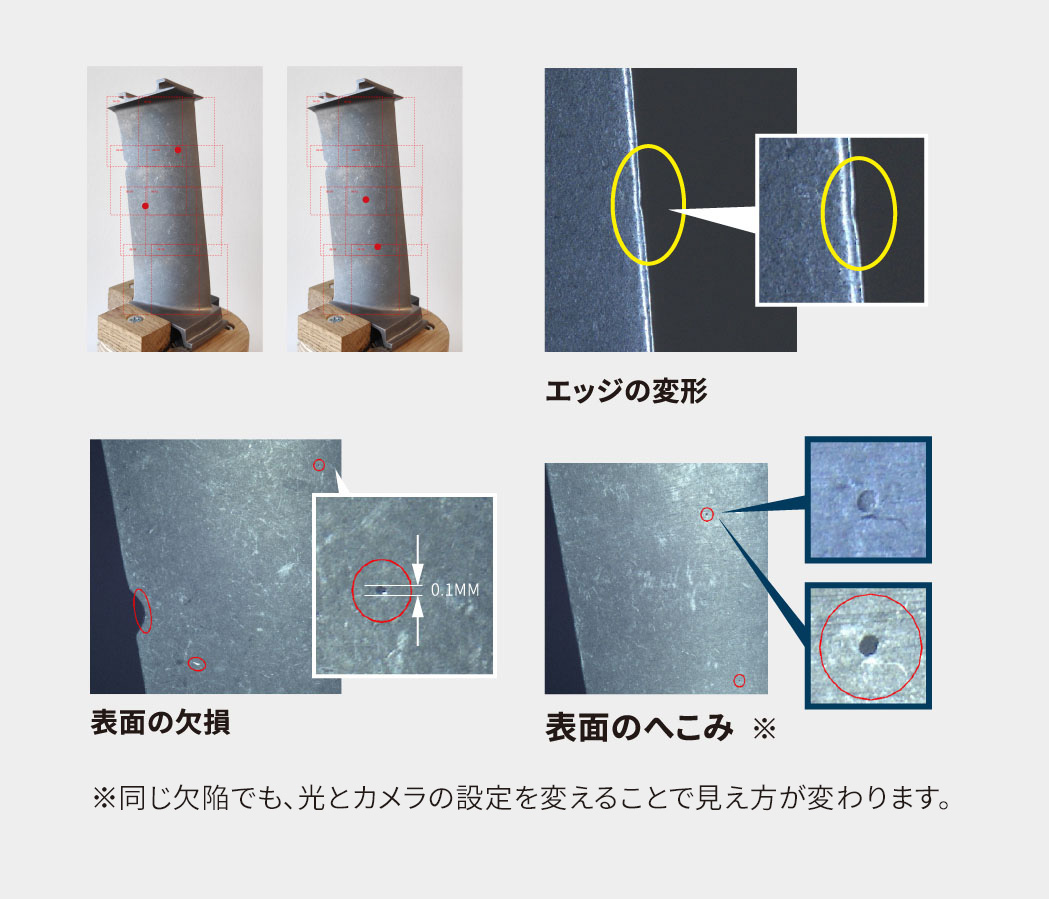
■ ブレード
導入の流れ
-
1. 製品紹介
KITOVについて、製品と技術、
使用事例などをご紹介します。 -
2. ご相談・ヒアリング
検査要件をヒアリングし、
テスト評価の内容、方向性をご提案します。 -
3. トライアル評価
良品、不良品のサンプルをお預かりし、
伺った要件に沿って検出の可否を評価します。 -
4. n増し評価(検証数の拡張)
テスト評価が「良」の場合、検査数を増やして
データを収集、精度を確認します。
(こちらは有償にて承ります) -
5. 発注・納品
ご発注後、納入。
運用支援、保守なども
ご相談ください。
システム構成

KITOV

KITOV (回転テーブル付き)
仕様
| 外形 | W856 mm ×D1157 mm ×H1785 mm (KITOV-回転テーブル付き-参考値) |
|---|---|
| 質量 | 350 kg (KITOV-回転テーブル付き参考値) |
| 電源 | 相数 単相 電圧 AC200-15% ~AC240+10% V |
| 検出可能欠陥サイズ | 0.1mm以上 |
| 対象ワークサイズ | 直径800mm×高さ400mm以内 ※ (KITOV-回転テーブル付き参考値) |
| 対象ワーク質量 | 40kg以内(ワーク固定冶具質量を含みます) ※回転テーブルご使用の場合 |
| CMOSカメラ | 500万画素、カラー |
| 画角 | 85mm × 71mm(応相談) |
| リング型LED照明 | 白色光1台 |
| バー型LED照明 | 白色光4台 |